Kiørboe, T (2013). Attack or Attacked: The Sensory and Fluid Mechanical Constraints of Copepods’ Predator-Prey Interactions. Integrative and Comparative Biology, pp. 1–11, doi:10.1093/icb/ict021
This article examines how pelagic copepods manage the role of simultaneously being predator and prey. Most animals are predator and prey at the same time. This dual position represents a fundamental dilemma because gathering food often leads to increased exposure to predators. This article examines how pelagic copepods manage the role of simultaneously being predator and prey. Copepods are ‘sensory and escape’ machines, two features that on the one hand allow them to efficiently sense and escape predators and perceive and select high quality food; but on the other hand also make them attractive prey because of their high nutritional value compared to, e.g., jellyfish. Within the constraints of the copepod body plan, optimization of feeding tradeoffs leads to testable predictions about the magnitude of their metabolism, clearance, and growth rates.
The article is available here.
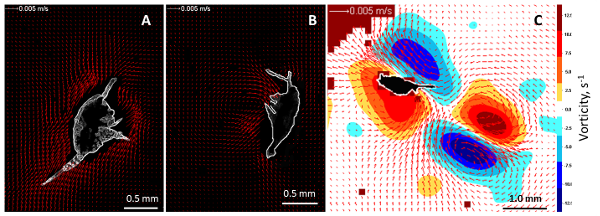
Different ways of feeding produces different fluid signals to predators, here visualised by PIV. From left to right: a crusing Temora longicornis, Acartia tonsa producing a feeding current, and Acartia tonsa performing reposition jumps as part of an ambush feeding strategy.